Lehrveranstaltungen
Die in der Roboterfabrik zusammengefassten Vorlesungen und Tutorien rund um Robotik haben das Ziel, ausgehend von einer breiten Vermittlung der notwendigen Grundlagen (Regelungstechnik 1 und 2, Robotik 1), in erweiterten Angeboten (Robotik 2, Mensch-Roboter-Kollaboration, Maschinelles Lernen und moderne Regelungsmethoden in der Robotik, Humanoid Robotics Lab, Mobile Manipulation) Details zu vertiefen.
Robotik 1
Vorlesungsinhalte:
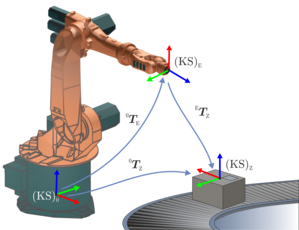
- Kinematik und Dynamik von seriellen Robotern
- Grundkonzepte der Roboterregelung und -steuerung
- Grundkonzepte der Bewegungsplanung
- Beschreibung der Vorlesung (Prof. Ortmaier, Wintersemester)
- Beschreibung der Vorlesung (Prof. Haddadin, Sommersemester)
Mensch-Roboter-Kollaboration



Vorlesungsinhalte:
- Methoden zur Untersuchung von Verletzungsrisiken in der MRK
- Mechanischer Entwurf und dynamische Modellierung für Sicherheit, Performanz und Feinfühligkeit
- Methoden zur Kollisionsdetektion und -reaktion, zur Regelung in unbekannten Umgebungen und zur reaktiven Bahnplanungen für die MRK
Robothon:
Anwendung des gelernten Wissens an realen aktuellen Systemen im Rahmen innovativer Applikationen. Ab dem Sommersemester 2018 wird das Franka Emika System eingesetzt.
Bisherige MRK-Robothons
Maschinelles Lernen und moderne Regelungsmethoden in der Robotik



Vorlesungsinhalte:
- Grundlagen des maschinellen Lernens
- Aktuelle Methoden des maschinellen Lernens für robotische Anwendungen
- Moderne Regelungsmethoden für robotische Anwendungen
Robothon:
Anwendung der Vorlesungsinhalte für das maschinelle Lernen verschiedener Grundfertigkeiten von Robotern (Fügearbeiten, Bohren, etc.). Ab dem Wintersemester 2017/18 wird das Franka Emika System eingesetzt.
Mobile Robotik



Veranstaltungsinhalte:
Einwöchiges Tutorium zu mobiler Manipulation
mobile Manipulation, Objekterkennung, Lokalisation oder Navigation
Programmierung in ROS (Robot Operating System) in der Programmiersprache C++
Beschreibung der Veranstaltung
Robothon:
Programmierung industrienaher Applikationen mit mobilen Robotern, Erarbeitung eigenständiger Lösungen im Team mit dem Roboter Kuka youBot.
Humanoid Robotics Lab
Veranstaltungsinhalte:
Grundlegende Methoden der Humanoiden Robotik
Stabilisierung des zweibeinigen Gehens gegen Störeinflüsse, Sturzprädiktion und –vermeidung, Sturzvorbereitung und Schadensminimierung, Aufstehen nach einem Sturz
Regelung unter besonderer Berücksichtigung der Nachgiebigkeit und von Umweltkontakten ("Whole body compliance control")
Beschreibung der Veranstaltung
Robothon:
Praktische Erprobung der gelernten Methoden mit Hilfe von Simulationen, Experimentalplattformen und kompletter humanoider Robotersysteme (Aldebaran Robotics Nao).